

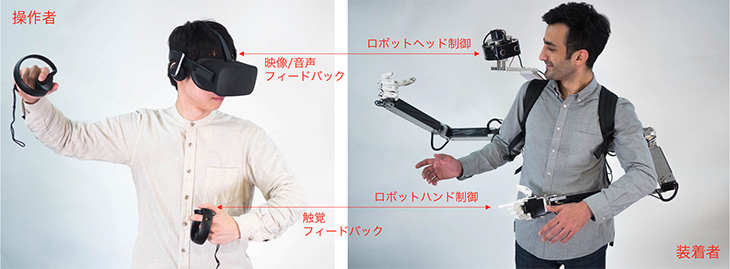
東京大学、慶應義塾大学、科学技術振興機構(JST)が共同開発した遠隔二人羽織ロボット『Fusion(フュージョン)』。『Fusion』は、ヘッドマウントディスプレイを装着して遠隔操作する人と、ロボットヘッドとロボットアームを搭載したバックパックを実際に装着した人の2人が、ほぼ同一の視点で空間を共有することができます。これにより2人での共同作業を可能にしたシステムとなっています。
遠隔操作する人とバックパックを装着した人との間で3タイプのコミュニケーションを可能にしているのが『Fusion』の特徴です。ロボットハンドを使用した共同作業を可能にする「Directed(直接的な共同作業)」。アタッチメントを手首用のバンドに取り換えることで、装着者の手先の位置や姿勢を動かすことを可能にする「Enforced(動きの指示)」。そして、ロボットアームで装着者を引っ張って歩行を誘導することが可能にする「Induced(動きの誘導)」。
実際に2人で『Fusion』を装着すると、バックパックを装着した人はリアル千手観音といった感じに。
Fusion: Full Body Surrogacy for Collaborative Communication (YouTube)
https://youtu.be/Nrc7gH6dydw
慶応義塾大学のムハマド ヤメン・サライジ特任講師による『Fusion』のデモ動画。
SIGGRAPH 2018 – Emerging Technologies: “Fusion” (YouTube)
https://youtu.be/fawven4R43w
8月12日~16日までカナダのバンクーバーで開催された『SIGGRAPH 2018』での様子。海外では「ドクター・オクトパスのようだ」という声があったりもします。
『Fusion』は、引き続き遠隔共同作業性能の向上や技能学習のためのプラットフォームを開発していく予定だそうです。人手不足と言われている介護の現場などでニーズがありそうですね。2名で4~5名分の仕事ができるよう装着できるロボットアームの数が増えれば、工事現場などでも需要があるかもしれません。
※画像とソース:
https://www.jst.go.jp/pr/announce/20180809-2/index.html