
生物の動きや機能を模倣し、人工的に再現する技術のことを生体模倣技術(バイオミメティックス)と言います。シャープが家電開発に生体模倣技術を活用していたのはよく知られた話ですが、最近ではロボット開発の分野で生体模倣技術が盛んに活用されているようです。
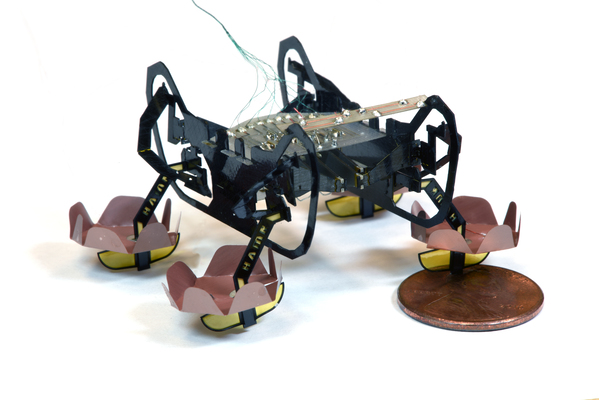
米ハーバード大学のジョン・A・ポールソン工学応用科学学部が開発したゴキブリ型ロボットが『ハマー(HAMR)』です。『ハマー』は、ハーバード歩行マイクロロボット(Harvard Ambulatory Microrobot)の略称となります。
Swimming cockroach-inspired robot (YouTube)
https://youtu.be/t1GNIdX7wYc
ハーバード大学は、陸上だけでなく水上・水中歩行が可能になった最新版『ハマー』のニュースを7月2日に公表しました。足にあるパッドが受ける表面張力を活用することで、アメンボのような水上歩行を可能にしています。水中歩行時は、パッドに電圧をかけることで潜水します。水底では、陸上と同じように歩行することが可能です。『ハマー』は重さ1.65グラムで、重量が1.44グラムまでのものを積載し、水上歩行することができます。

『ハマー』のさらなる歩行能力向上のため、ヤモリにヒントを得た粘着質な足やジャンプができる機能などを検討しているようです。どうやら最新のロボット開発には生体模倣技術が必須なようです。カエルのような強力なジャンプ機能とかも付加されそうですね。見た目はゴキブリ、水上での動きはアメンボ、ジャンプする時はカエルといったハイブリッドなロボットが登場する日も近い!?
※画像とソース:
https://www.seas.harvard.edu/news/2018/07/next-generation-robotic-cockroach-can-explore-underwater-environments